
Biography
I am a Ph.D. from ZheJiang University, with the State Key Laboratory of Industrial Control Technology, under the supervision of Prof. Ping Li and Yu Zhang. My research interests lie in the areas of Advanced Robust Motion Control, including but not limited to UAV (experiment over 8+ years) and robotics.
I have a strong track record in creating complex mechanical, circuit systems from scratch (see my Projects). Rapid algorithm implementation to industrial systems is within my capabilities.
💻 Experience

 |  |
📖 Educations
Research interests include:
- Nonlinear Adaptive High Order Sliding Mode Control / Observer
- System Modeling and Identification
- Robust Control of Nonlinear Time-Varying Input Delay Systems / Nonlinear Model Predictive Control
- Discrete-Time Robust Event-Triggered Control
- Realization of other conventional algorithms, like ADRC, H ∞, MRAC and L1 Adaptive, etc.
Research interests include:
- Control and Design of Unmanned Aerial Vehicles
- Embedded system and RTOS development
- Design of Complex Mechatronic Systems
📝 Publications
💾 Patent
- Yu Zhang, Zhangzhen Zhu, Yicheng Zeng. CN115806071A.
- Yu Zhang, Zhangzhen Zhu, Ping Li. CN108945395.
PDF Multi-degree-of-freedom rotor system, rotor system for preventing entanglement, and unmanned aerial vehicle.
💻 Research

Robust Nonlinear Self-Triggered Control Policy for a Novel Fully Actuated UAVs
Zhangzhen Zhu, Yongliang Lin, Yu Zhang
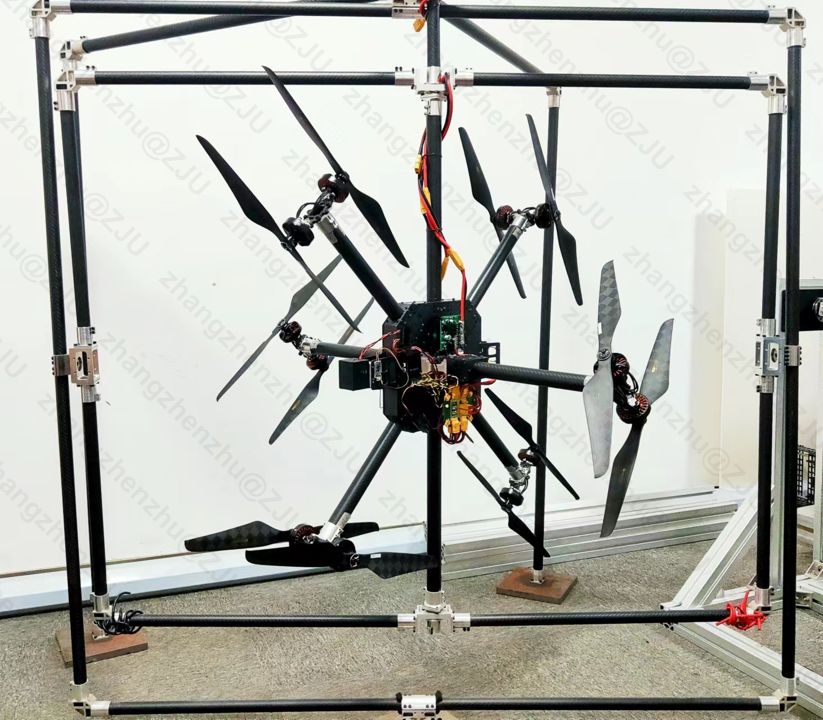
RSETC (robust self event-triggered control) is a computationally efficient and robust control policy for invertible nonlinear systems, it ensures robust performance under various perturbations and alleviating communication burden simultaneously. A novel fully actuated multirotors applied this method shows great robustness to perturbations and is able of tracking six dimensional decoupled trajectories without continuous background sensor monitoring.
Adaptive Multivariable Super-Twisting Control for Nonlinear Systems and Its Application to A Novel Fully Actuated UAV
Zhangzhen Zhu, Yu Zhang, Ping Li
Adaptive Finite-time Multivariable Super-twisting Algorithm (AFMSTA) is capable of stabilizing the invertible MIMO nonlinear system in finite-time despite the co-existence of unknown model uncertainties and exogenous disturbances. This algorithm guarantees high precision steady state and estimates the bound of the perturbation online. An omni-directional control on the novel fully actuated UAV is accomplished.
Adaptive Quasi-Fixed-Time Integral Terminal Sliding Mode Control for Nonlinear Systems
Zhangzhen Zhu, Yongliang Lin, Yu Zhang
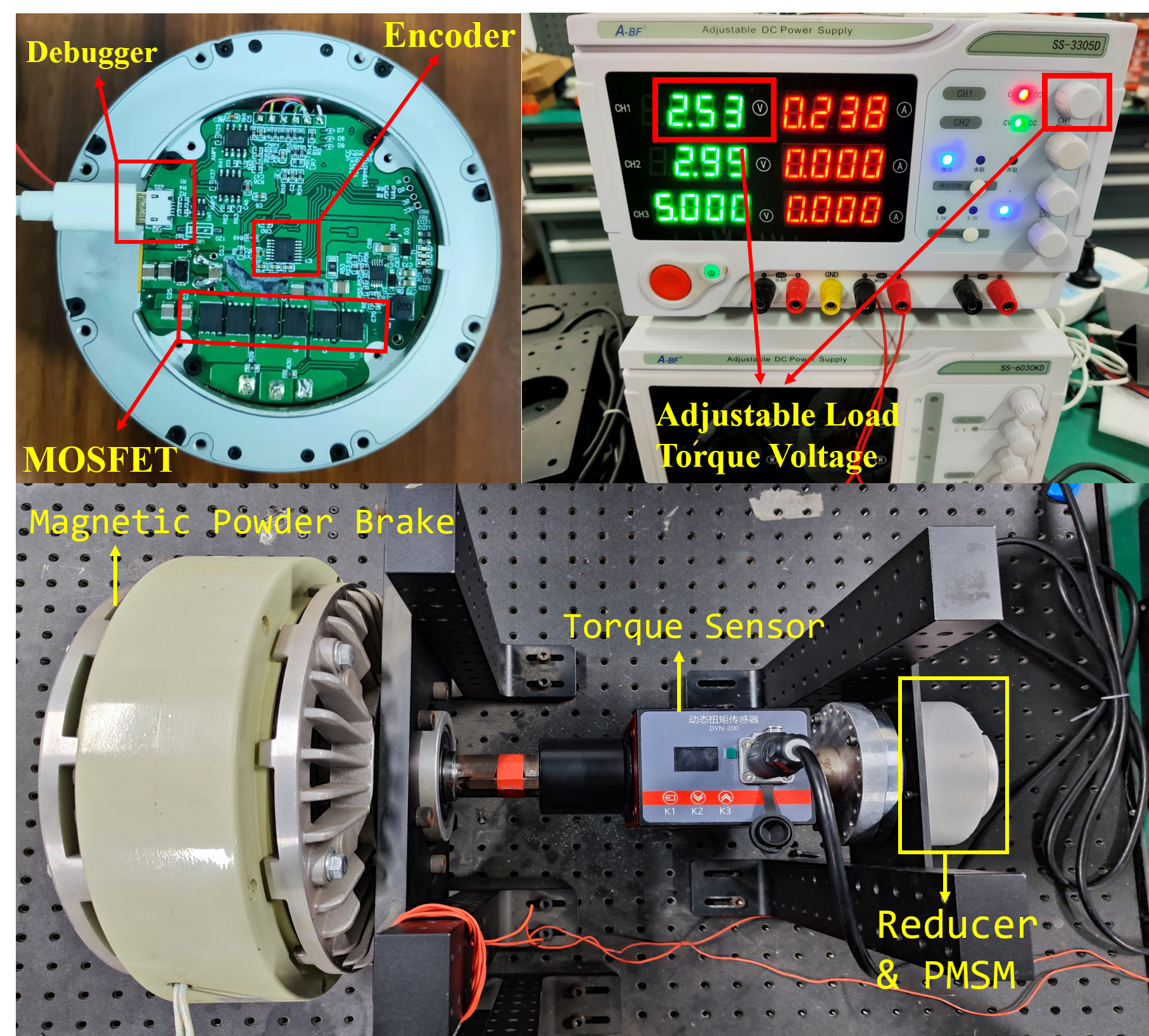
Adaptive quasi-fixed-time integral terminal sliding mode control (AFTSM) can stabilize the invertible nonlinear systems with unknown varying perturbations in quasi-fixed-time, while estimating the lumped perturbations within same time, even with large initial state errors. Besides, a novel nonsingular adaptive layer function is introduced, leading to a completely chattering-free control with no gain overestimation. The method's superiority is demonstrated through a permanent magnet synchronous motor control experiment.
Robust full order sliding mode control for nonlinear systems under time-varying input delay
Zhangzhen Zhu, Yongliang Lin, Yu Zhang
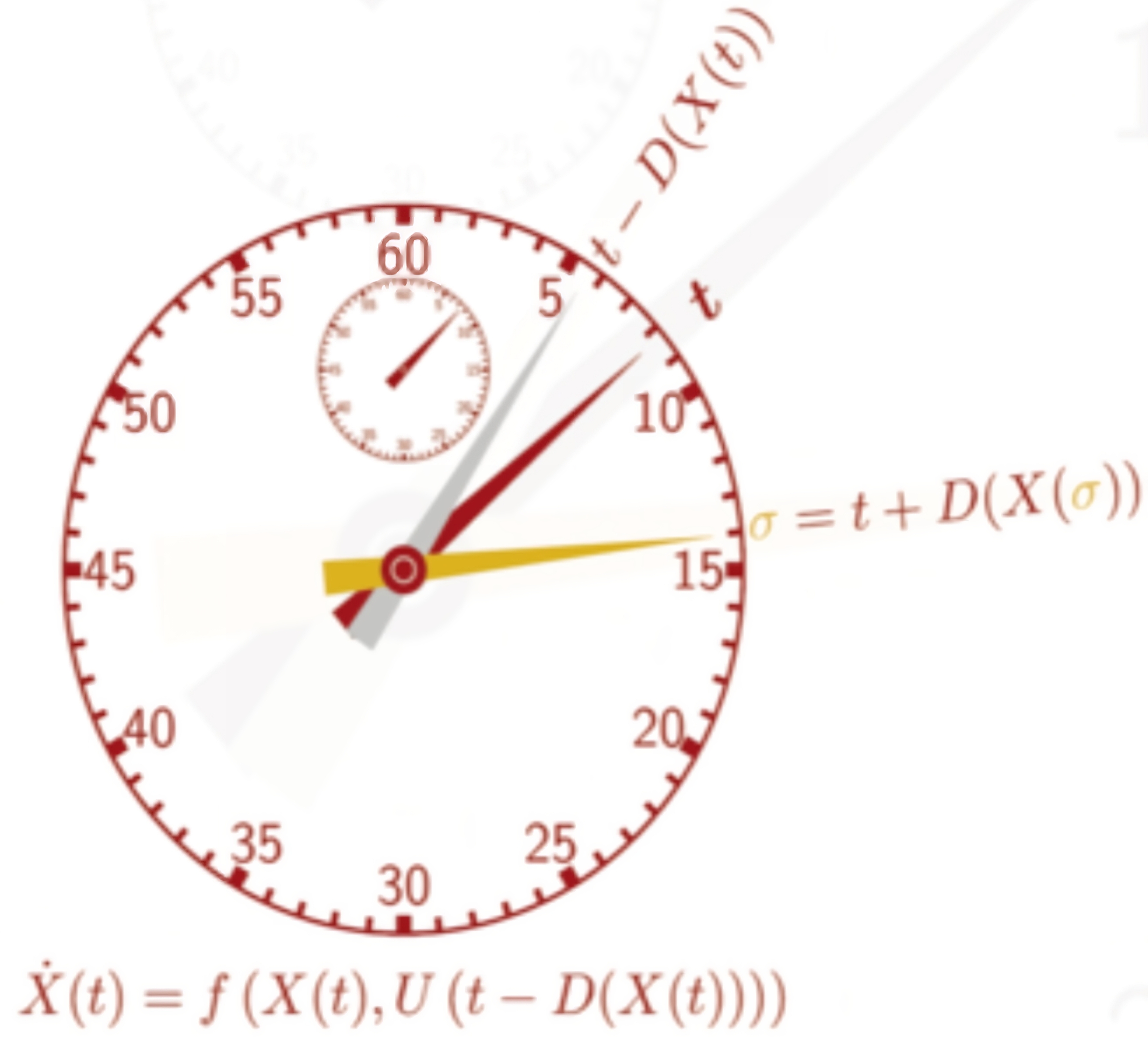
This paper proposes a robust predictive control to solve the stabilization problem for nonlinear system with model uncertainties, exogenous disturbances and time-varying input delays. It’s still an open problem to synthesize the sliding mode control with infinite-dimensional backstepping transformation since the control input under SMC is non-differentiable. Hence, our newly designed method is presented to solve this open problem.
Modeling and MPC-based Pose Tracking For Wheeled Bipedal Robot
Jianqiao Yu, Zhangzhen Zhu, Junyuan Lu, Sicheng Yin, Yu Zhang
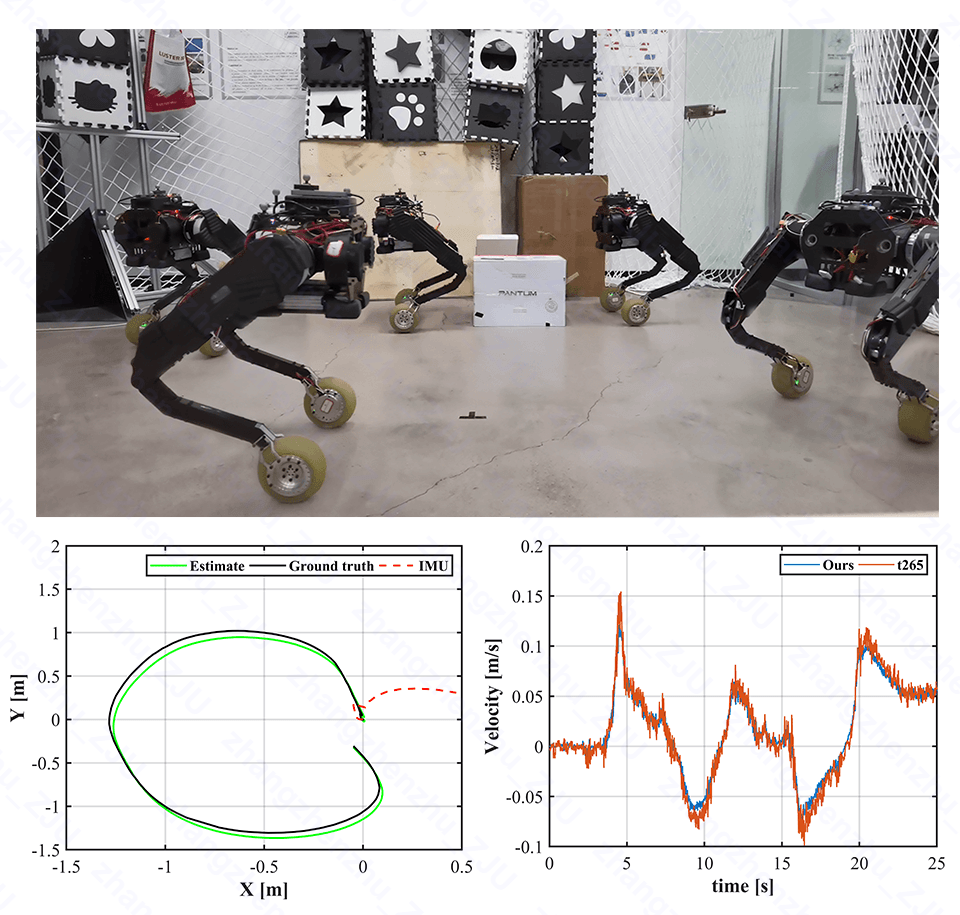
Model predictive control based robot pose controller is proposed for our newly designed wheeled bipedal robot. The robot features leg mechanisms with three degrees of freedom, which effectively decouples its rolling and leaning motions. Instead of using a wheeled linear inverted pendulum model, a floating base model is introduced to maximize motion flexibility. This hierarchical MPC control can track pose trajectories with lower error than the traditional feedback controllers.
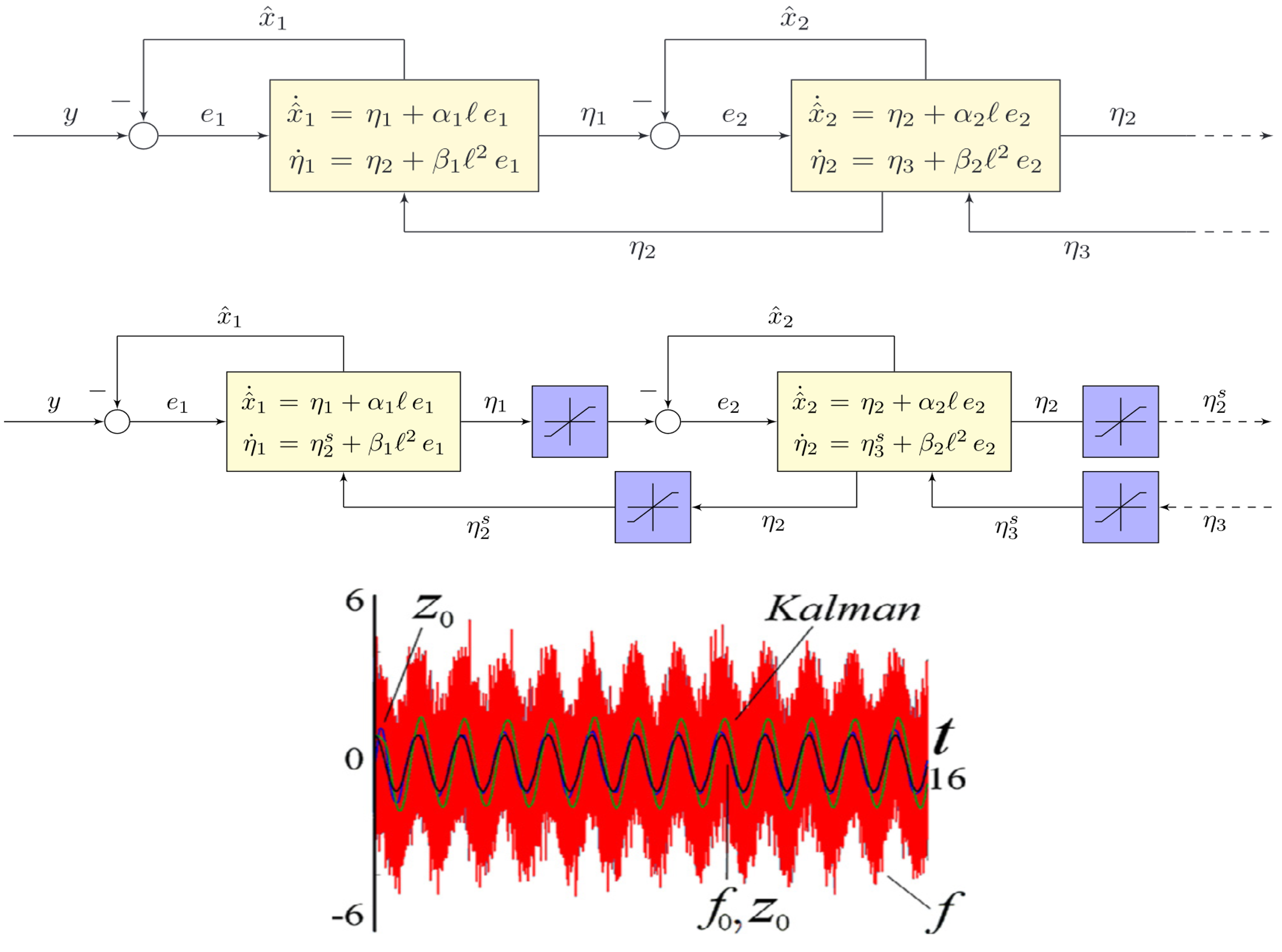
Adaptive and continuous low-power exact sliding mode observer for arbitrary-order nonlinear systems.
To be submitted
ACLEO Adaptive Continuous Low-power Exact sliding mode observer is a powerful tool for the output regulation problems under measurement noises. It ensures finite time convergence of the system state under the unkonwn disturbance, which only needs the mild assumption that the disturbance's derivative exists. Meanwhile, the disturbance is exactly estimated compared with the conventional High Gain Observers, and high-order continuous control signal is guranteed.
 |  |
Discuss and analyze the above paper in-depth with academic experts Leonid Fridman and Jaime A. Moreno in Sliding Mode Control, at Yokohama, IFAC 2023.
💻 Internships
- 2016.10 - 2017.06, NanJing TaoXun Aviation Technology, NanJing.

